Bryan G. Ramirez Cabrera

Nobody ever figures out what life is all about, and it doesn't matter. Explore the world. Nearly everything is really interesting if you go into it deeply enough. ~ Richard Feynman
M.Sc. Aerospace Engineering
ISAE-Supaero M.Sc. in Aerospace Engineering with major in Embedded Systems
Education
- Aerospace Engineering, M.Sc. - ISAE-Supaero - September 2022 - September 2024 (2 yr.)
- Bachelor’s Final Thesis - Politecnico di Torino - February 2021 - July 2021 (6 mo.)
- Aerospace Systems Engineering, B.Eng. - Universitat Politècnica de Catalunya - February 2017 - July 2021 (4 yr.)
Work Experience
- Simulation Software Engineer - A330 MRTT Air-to-Air Refueling - Airbus Defence and Space SAU (1yr as GMV) - November 2024 - Present
- Sofware engineer for the AAR (Air-to-Air Refueling) simulation console and cockpit systems.
- Activities: development, integration and bench-test.
- Adjunct Professor - IES Abroad Madrid - January 2025 - July 2025
- Professor of the course: ER/ERM 341 - Control Engineering.
- Syllabus: here.
- Avionics Software Engineer Intern for AvioCast (AvioBook) - THALES AVS (Avionics Systems) - April 2024 - September 2024 (6 mo.)
- Avionics simulation of flight data in A717 and A429 for AvioCast applications.
- AvioCast system bench test renovation and automation.
- Worked from linux kernel level until CI/CD Gitlab Pipelines.
- Centered into the AvioBook Wireless QAR service (https://aviobook.aero/products/aviocast)
- Key learnings: Simulation, Mender (OTA), AWS, CI/CD, Docker, Gitlab Runners and Cybsersecurity.
- Software Engineer for Research in Air Traffic Management (ATM) - Universitat Politècnica de Catalunya - October 2021 - October 2022 (1 yr.)
- See project here: Dynamo3
- Developer in C++ of a trajectory optimization for commercial aircraft.
- EU project involved: CREATE. Coordinated with other companies within the field (i.e., NLR).
- Published paper in Proceedings of SESAR Innovation Days (SIDs) 2022. Available here.
- Aircraft performance models from Base of Aircraft Data (BADA) from EUROCONTROL.
- Maintenance and overhaul from reported bugs from users and clients.
- Implementation of new features, integration, data flow management, validation analysis, stress test software design, etc.
- Reference: Xavier Prats, PhD
- Electronics Graduate Teaching Assistant - Universitat Politècnica de Catalunya - September 2020 - January 2021 (6 mo.)
- Electronics of Telecommunications assistant lecturer for the freshmen of the telecommunications program.
- Lecturer of basic electronic instruments at the laboratory such as: power suppliers, signal generators, oscilloscopes. As well as other electronic components: transistors, AOs, capacitors, resistors, etc.
- Reference letter.
Professional experience: projects
In each of these sections, the personal contribution in chronological order is showcased for every professional experience I have had till the date.
Airbus Defence & Space (1 yr. as GMV)
Just right after defending my master’s intership in Thales and after having had a glimpse into the world of simulation… I flew to Spain’s capital in order to enter into the core of very hostile simulation environments: Air to Air Refueling (AAR) for the A330 Multi-Role Tanker Transport (MRTT). Till the date, I still enjoy delving into the challenges of AAR simulation.
 Image source: https://www.airbus.com/en/products-services/defence/military-aircraft/a330-mrtt
Image source: https://www.airbus.com/en/products-services/defence/military-aircraft/a330-mrtt
At our department, two worlds of simulation are being developed: Full Flight Simulator (FFS) and Air Refueling Monitoring System (ARMS). The latter refers to the Refueling Console or Refueling Command poste, which can be seen here below.
 Image source: https://imagesdefense.gouv.fr/fr/
Image source: https://imagesdefense.gouv.fr/fr/
Among many tasks, the most relevants that I have been taking care of are:
- Air Traffic Service Unit (ATSU) partial simulation of the model. Mainly the Controller Pilot Data Link Communications (CPDLC) submodel which is interconnected with Air Traffic Control (ATC) TWR and commanded from the pilot through DCDUs and monitored by the MCDU.
- Datalink Control and Display Unit (DCDU)s interface simulation.
- Inmersive ATC environments by using AI trained models. Real time embedded simulation of communications in traffic congested airspaces between Ground (ATC TWR) <-> Air (Tanker) <-> Instructor. It is geographic sensitive, comprising multiple voice accents around the world.
- Automatic Terminal Information Service (ATIS): an airport meteorological broadcast service for aircraft in its surroundings from METAR or manual meteorological reports.
- Universal Air Refueling Receptacle Slipway Installation (UARRSI): device simulation of the physical hardware on top of the front fuselage in charge of receiving fuel from another tanker.
- Simulation of Military Information Distribution System (MIDS) included in several tactical mission systems onboard of the aircraft.
THALES
During my stay in France I had the opportunity to join Thales Avionics Systems (AVS) for my internship for the masters at ISAE-Supaero.
In there, I integrated my knowledge into a real embedded device: AvioCast. The scope of my internship included a full automation and renovation of the bench test for software production.
The AvioCast device is composed by (see hardware image below):
- Server: non-certified software.
- Docker: certified processing unit.
The docker collects avionic data to later be used by the server who interacts with the operator base of the airplane in several ways. AvioCast offers, among other services, the direct wireless offload of QAR (Quick Access Recorder). That is, when the aircraft lands the flight data is downloaded in seconds from the operator to be quickly assessed by their flight analysis engineers.

Image source: https://aviobook.aero/products/aviocast
The AvioCast (see above) is located just under the cabin (see below), offering quick access in case of maintenance.

Image source: https://aviobook.aero/products/aviocast
Main activities as a test-bench engineer involved:
- Simulation of flight data through A429 and A717 buses in order to process critical information.
- Software development in order to send this simulated data through avionic hardware like UA2000 Ballard Cards or similar.
- Design of a new electronic board to centralize connections.
- Upgrade of the test-bench software to fit these new requirements.
- Production deployment into the target through Over-the-Air (OVA) software like Mender combined with cloud services such as Amazon Web Services (AWS).
- From scratch mise-en-place of a full software production pipeline (comprising the before mentioned technologies) by using GitLab from a single commit.
UPC
I secured a position as a Research Software Engineer for ATM (Air Traffic Management) just after graduating from my BSc. In there, I mainly contributed to their trajectory optimizer and predictor: DYNAMO3. Plus, I got involved into research activities and greatly collaborated in the EU SESAR project: CREATE.
Software developer for DYNAMO3
-
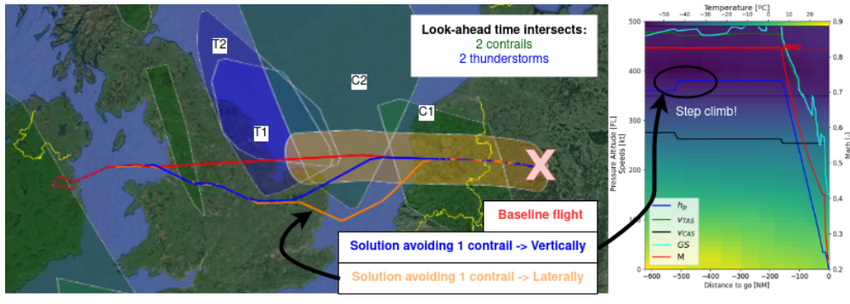
Meteorological data simulation. In order to increase the fidelity results from DYNAMO3, realistic meteorological data was input for the optimizer to decide whether some routes are less or more cost effective mainly in relation to: wind, pressure and temperature. Plus, thunderstorm identification could be done and contrail generation sensitive volumes could also be found.
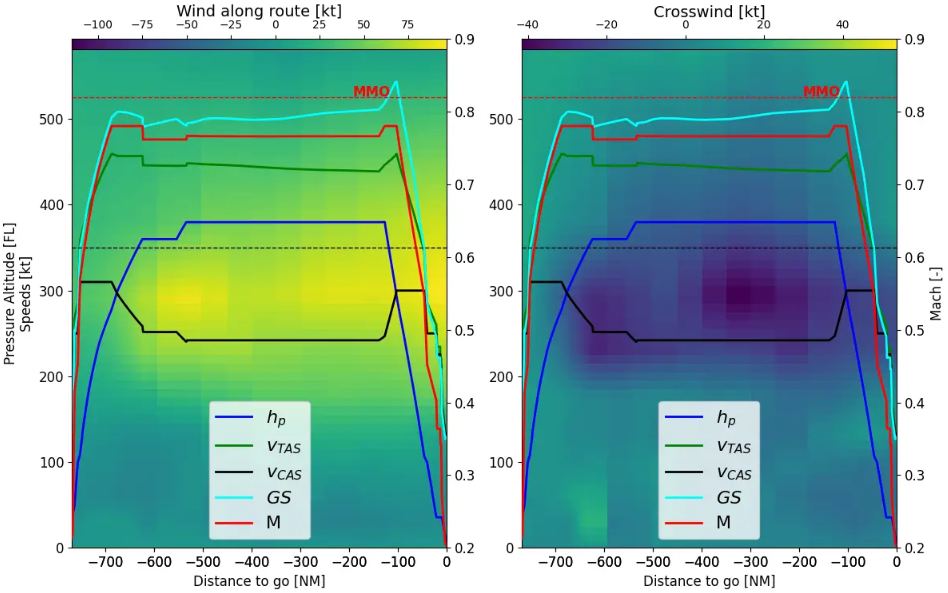 In the image above, it can be spotted that the trajectory (blue line) avoids flying trough the heavy crosswinds in order to burn less fuel, hence being less costly to the airline. The software was fed by real data from NOAA (National Oceanic and Atmospheric Administration).
In the image above, it can be spotted that the trajectory (blue line) avoids flying trough the heavy crosswinds in order to burn less fuel, hence being less costly to the airline. The software was fed by real data from NOAA (National Oceanic and Atmospheric Administration). -
Lateral optimization algorithms. DYNAMO3 suffered a heavy upgrade in terms of lateral optimization. Its main path planning algorithm, A* (Optimal A-Star search algorithm), was enhanced in order to overcome: local minimas, resolution issues, non dynamic grids, etc.
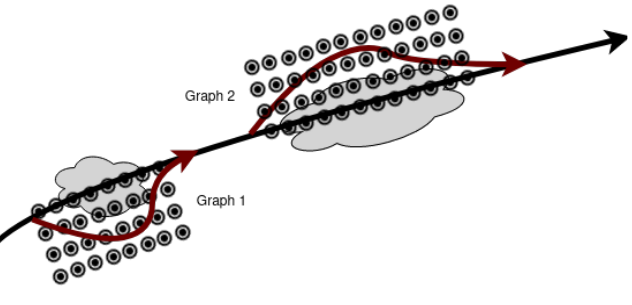 During flight, it might be possible to avoid laterally (usually a thunderstorm) an area. This could be done in an optimal way by introducing a dynamic grid (or graph) of flying waypoints between the entry and exit point of the area. These grids could be genereated to the left/right and/or both. Therefore, giving a wider amount of solutions for the optimizer to select the best one.
During flight, it might be possible to avoid laterally (usually a thunderstorm) an area. This could be done in an optimal way by introducing a dynamic grid (or graph) of flying waypoints between the entry and exit point of the area. These grids could be genereated to the left/right and/or both. Therefore, giving a wider amount of solutions for the optimizer to select the best one.
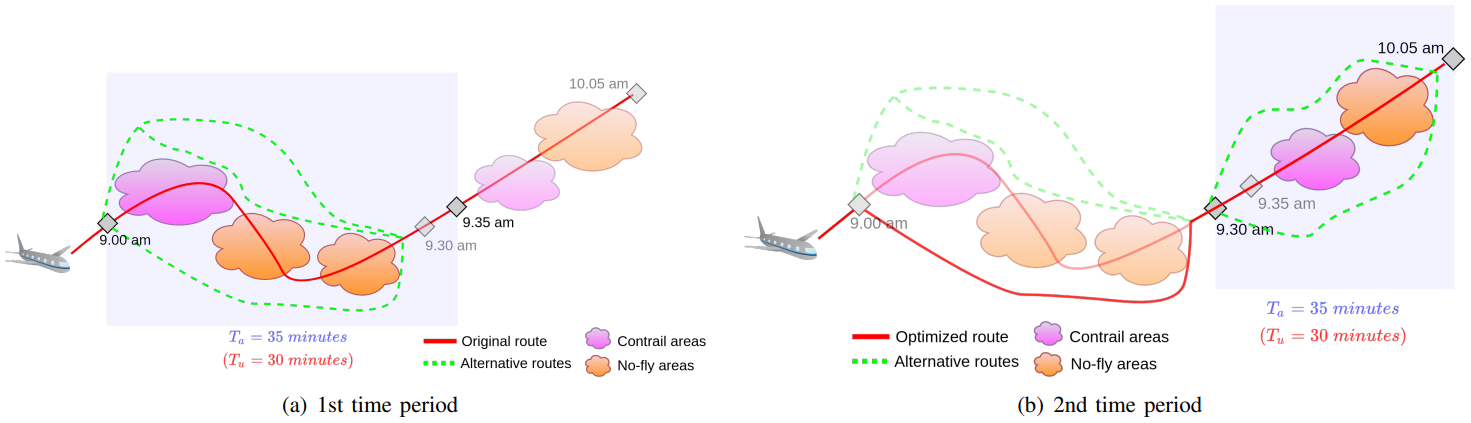
Paper Publication: Alternative 4D Trajectories for the avoidance of weather- and contrail-sensitive volumes
Personal/Academic Projects
Herein this section you will find some of the work I’ve achieved so far, going from the newest challenges to the oldest ones. All of which I consider have enriched me throughout my academic life.
Dassault UAV Challenge - 1st Prize
Dassault Aviation - September 2022 - April 2023 (8 mo.)
At the beginning of my masters course, some of my colleagues and I enrolled in what came to be one of my best experiences in the aeronautics world.
Dassault UAV Challenge is designed for those students eager to try their boldest ideas. And that’s what we did.
Our mission, which was to create a platform capable of demonstrating the deployment of a ballistic free fall medical delivery after visual input for the hypothetical case of a natural disaster event, achieved successfully its purpose, therefore winning the first prize.

My contribution focused on the core of the mission, which was the visual detection of an Aruco (or QR) marker on ground, after which a trap-door would open in order to place the good at the service of the injured.
The whole mission can be step-by-step revised in the following video here below (if image not available, click here):

The first prize of the competition was awarded to my team, being honoured with a VIP visit to Le Bourget Airport, for the Paris Airshow 2023, by the hand of Dassault Aviation. There, I had the opportunity to interact with their staff, who showcased their innovations, such as VR training models for fighter jet overhauling, new features under development in their simulators, and much more. We all really enjoyed the experience. See network impact here.
Orbit Uncertainties Propagator
January 2023 - June 2023
Within the frame of my M.Sc. in Aerospace Engineering at ISAE-Supaero, a research project is carried out in order to work hand in hand with their research department. In my case, I was offered a position in the Département Conceptinon et conduite des véhicules Aéronautiques et Spatiaux (DCAS). My mission consisted in developing a simulator for uncertainties propagation.
This project is the first step towards a cleaner space, where non-cooperative targets will be chased by an autonomous self-navigating satellite capable of predicting the future states of debris, un-operative satellites, meteorites, asteroids and much more.
This can only be attained by predicting all the most likely future state of those spatial objects, and this problem can be solved using Differential Algebra.
The software, written in C++, developed in GitHub by the name of VerneDA, has two main propagation engines:
- Translational: the state is composed by position and speed.
- Rotational: the state is composed by attitude, orientation and angular speeds. Plus th inertia matrix of the object is required for this engine.
Both engines need, in order to work, an initial state with their belonging probability function (i.e., Gauss, Uniform, etc.). Usually normal distribution is widely used for this purpose.
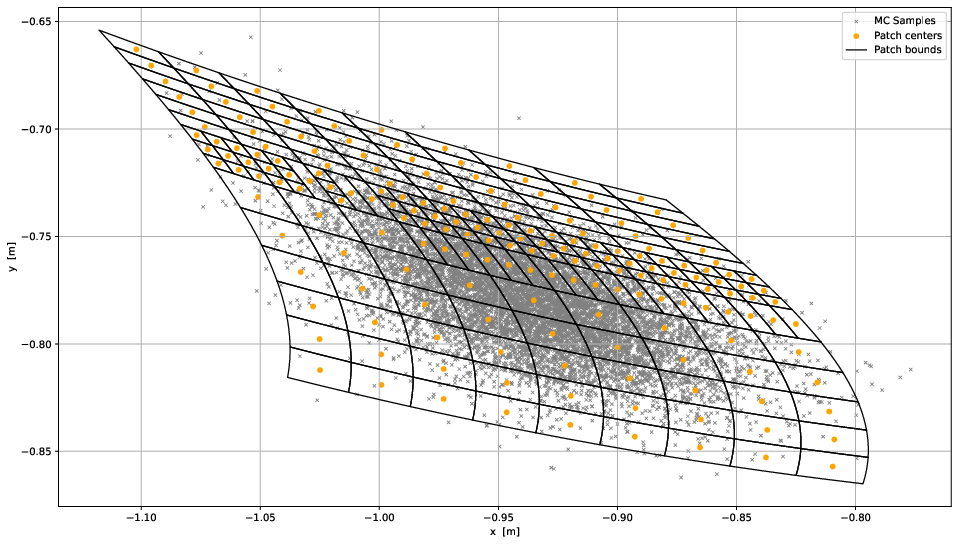
Here an example below about the uncertainty propagation in the translational dimension, for an initial state of X = [6678.135, 0.0, 0.0, 0.0, 9.46208, 0.0].
Being the initial scenario:
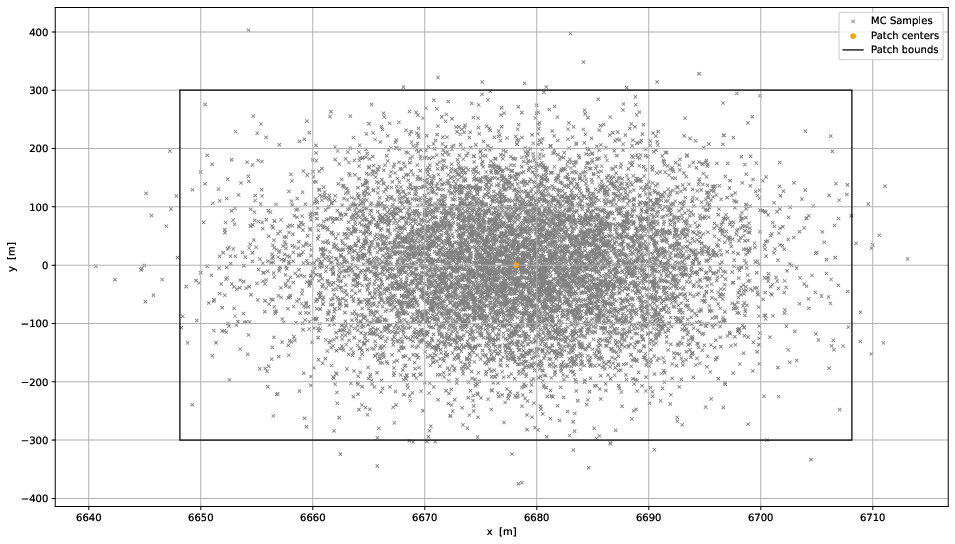
Being the final scenario after 1.5 revolutions:
Rotational simulation
During my free time
Recently, for the Orbit Uncertainties Propagator mentioned above, I have been developing a rotational simulator using OpenCV for validation purposes for the rotational engine of VerneDA software. You can find this repository as a fork of zainkhan-afk. I added some extra work and my contributions can be followed in this other repository: Open-CV-Renderer.
As it can be seen in the image below, the code has the capability of handling Hierarchical Transformations. Panels rotate along their own axis alongside the main rotation of the cube.
Plane stabilization project
During my free time
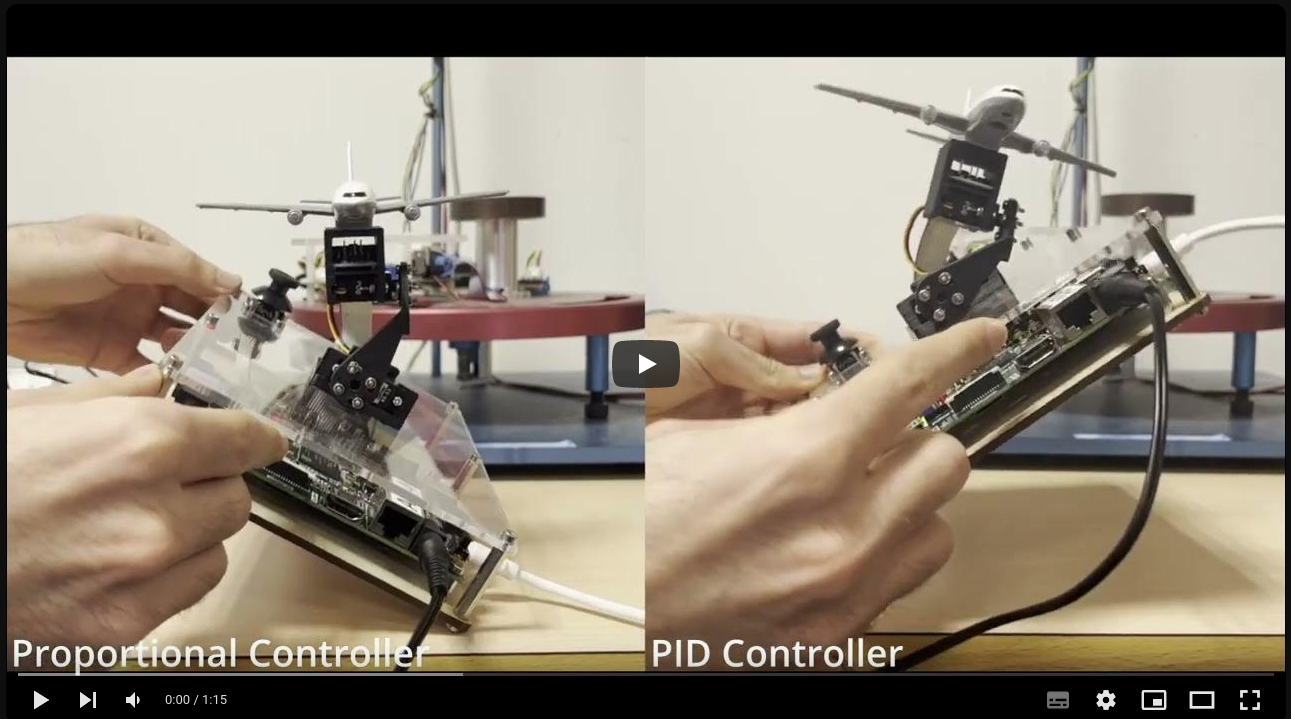
I found relevant this project which I did with my colleague Octavi Rad at ISAE-Supaero. Briefly summing up, as the diagram of connection below show, we had to design the control stabilization system of a little aircraft. That is, to any change in attitude measured by an accelerometer sensor ADXL362, an action was carried out by two servo-motors to stabilize it in the referent attitude.
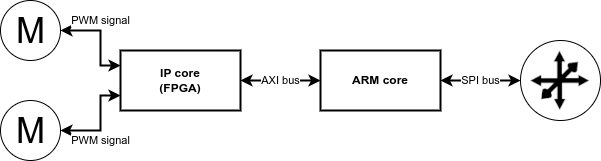
An accelerometer was connected to an ARM core processor, this communication was done by an SPI bus which we had to code by using SPI protocol in C.
The FPGA had an integrated processor, so we created an IP which was responsible for generating the corresponding PWM signals to steer the servo-motors in the reference value. The signals were generated in the FPGA, and it was coded by VHDL language. Finally, the duty cycle of the signals were set from the ARM core processor by using an AXI bus.
The last step was to code in C the control law to stabilize the plane, so we implemented a simple PID law in C. Video available in the link below.
Path finding algorithms
During my free time
For the completion of my bachelor studies, I worked in Politecnico di Torino for 6 months, hand in hand with Stefano Primatesta, PhD. He introduced me to the world of path-finding algorithms. These new methods were being studied for a wide variety of robots, such as underwater, surface and aerial robots (UAVs).
The bachelor thesis (available here) was focused on random sampled based algorithms which, as their name states, are not deterministic. However, they expose great interest in those complex scenarios (i.e., maze) where the path is (probabilistically) found at a greater pace using random algorithms such as PRM, RRT and their families.
From this brief introduction, I continued my own work, developing code to examine and study them more in detail, as well as discovering new horizons of commercialization of these random algorithms, which in the world of aeronautics have little hope right now. However, their presence can increase with good studies and better understanding of their behavior, especially from the probabilistic point of view, to ensure safety first among all the other solid characteristics that the world of aeronautics is known for.
The project I mentioned in the previous paragraph can be found in GitHub, and receives the name of Pathfinder. It is using Open Motion Planning Library (OMPL).
The tool has these main features:
- Encapsulation of the problem in a JSON file (i.e., initial/final pose, bounds, etc.)
- Square-modelling of obstacles
- 2D expandable to 3D
- Modular programming for fast execution and substitution of modules
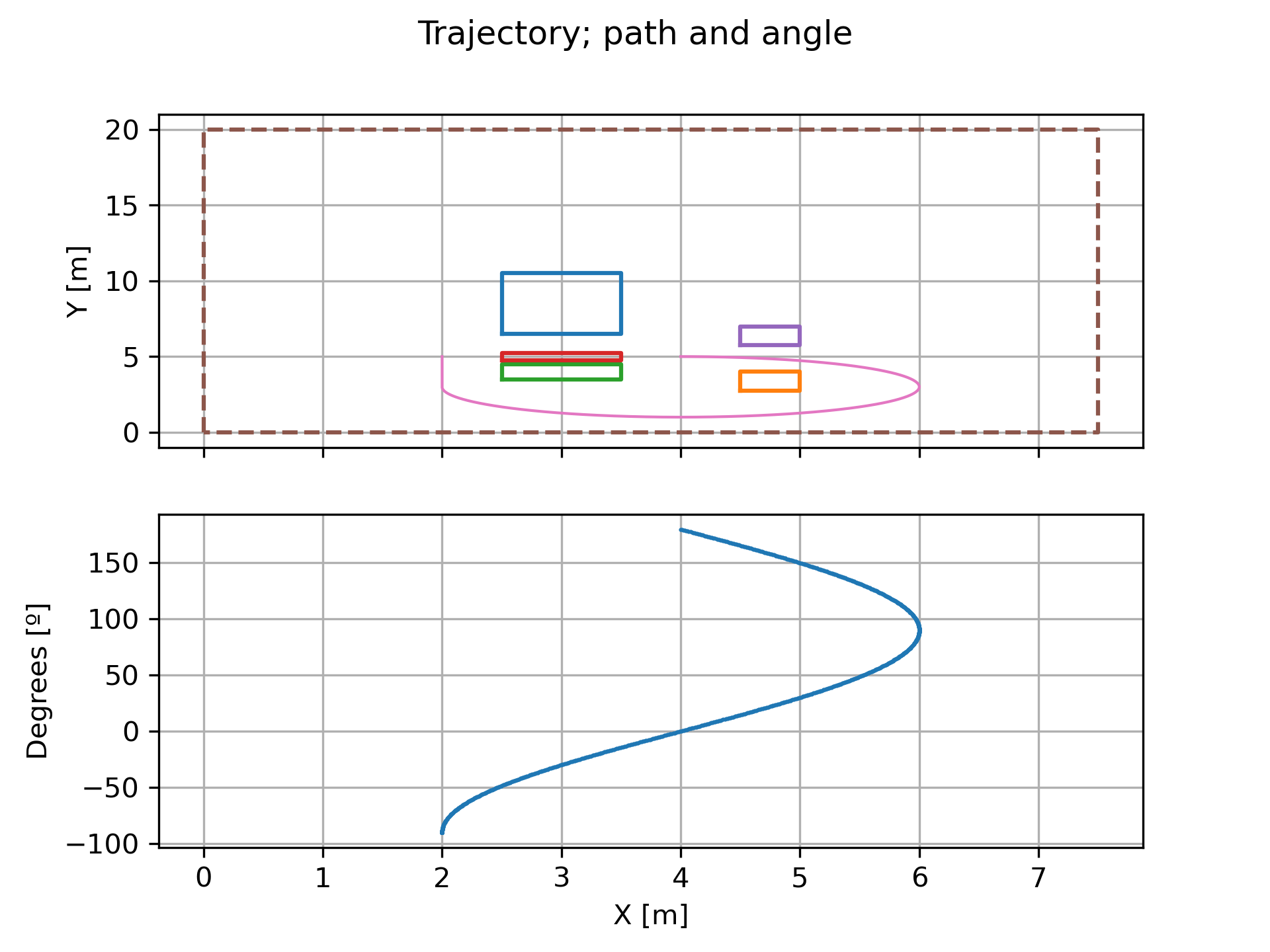
Here below, there is an example of a solution within Dubin space, where a solution is found in less than half of a second. More complex scenarios and detailed explanation of the literature can be found in my bachelor’s thesis mentioned above.
Obstacles are the square objects, while the resultant path is drawn in a pink line. Plus, the second graph indicates the steering angle in the X-Y plane.
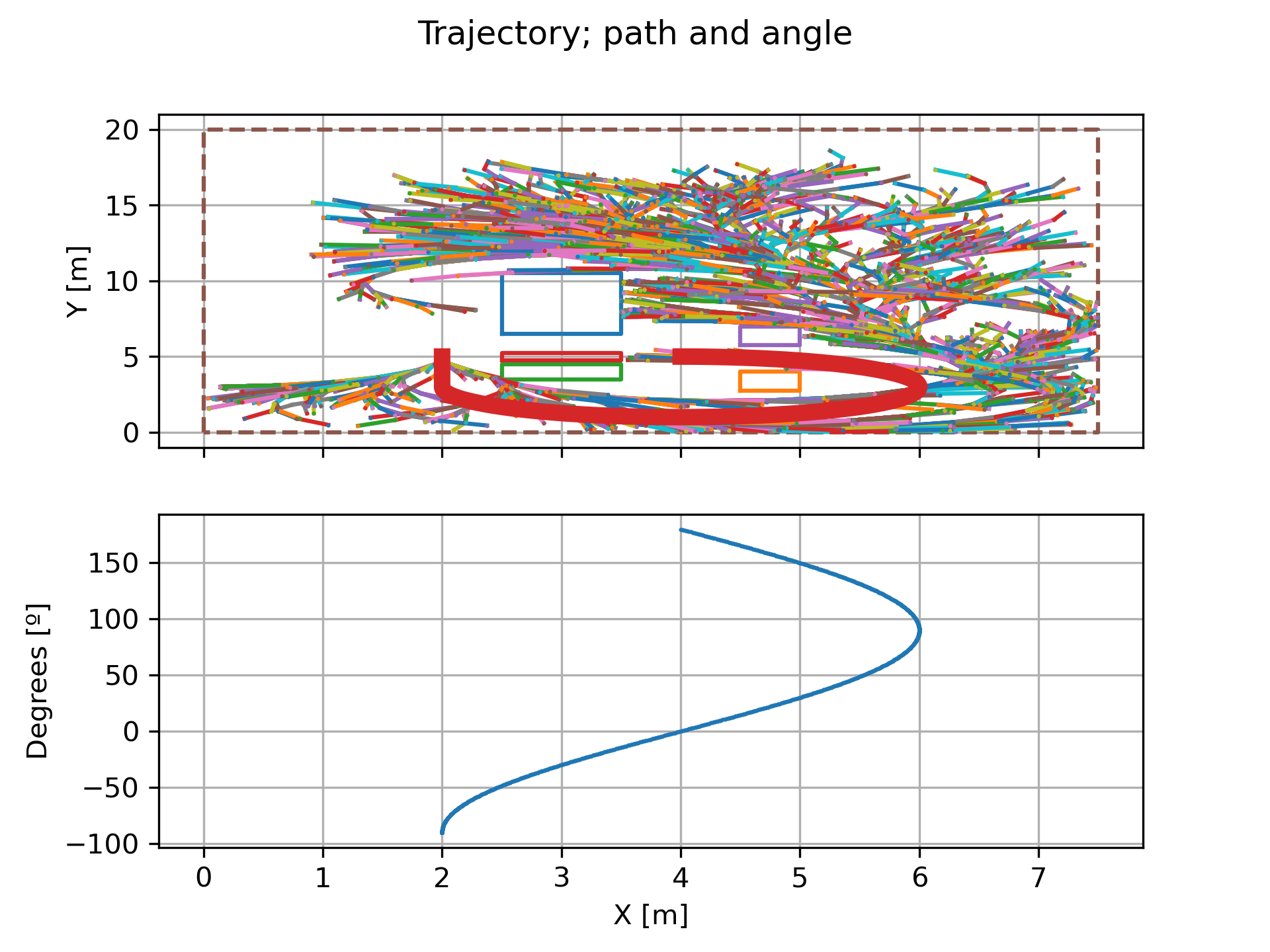
The figure below, depicts the RRT (Rapidly exploring Random Tree) branches.
Disclaimer
In the projects section described above some of the references are missing. However, they are included in the links I provide. In each one, the formal presentation of the project is being carried out. This portfolio is just a glimpse of what my projects are about.